Atención a clientes
(81) 2556-4023
(81) 2556-4024

Desde el invento de los carros como medio de transporte, las personas han dedicado sus vidas a desafiar los límites. Las carreras de autos se remontan a los principios del automóvil en los años 1870 en Francia. Del mismo modo que se probaron inmediatamente los límites tecnológicos de los primeros autos, actualmente, los investigadores y especialistas en robótica alrededor del mundo prueban los límites de la tecnología del manejo autónomo por medio de carreras organizadas.

La primera generación de automóviles Roborace DevBot
La serie de Roborace, que comenzó en 2016 con el desarrollo del auto de carreras autónomo DevBot, está desafiando los límites del desarrollo de vehículos autónomos por medio de las carreras. La temporada Alpha de Roborace se llevó a cabo en 2019, y fue un orgullo ver que Autonomous Racing Graz hiciera uso de nuestros sensores para traspasar la barrera del desempeño de vehículos autónomos por medio de LiDAR (detección por luz y distancia) de alta resolución para una localización mejorada.
Autonomous Racing Graz
Autonomous Racing Graz, un equipo de investigadores de la Universidad de Graz y de Virtual Vehicle quienes unieron fuerzas, compitieron en dos carreras del circuito de la Temporada Alpha de Roborace. La Temporada Alpha consistió en una serie de eventos, varios de los cuales eran a contrarreloj con el objetivo de probar la habilidad de un equipo para superar ciertos obstáculos técnicos.

En la línea de salida, listo para correr
Dirigido por Daniel Watzenig, el equipo de ARG compitió en dos de estos eventos: el primero en Zala Zone en Hungría y el segundo en Croix en Ternois en Francia. Dichos retos consistían en que los coches de carreras condujeran de manera autónoma en un circuito, pasando por espacios estrechos delimitados por conos a lo largo del trayecto y cada vez que se toca el cono, se recibe una penalización de tiempo.

El DevBot 2.0 en la pista en Francia con el OS1-16
Todo es cuestión de localización
Para terminar las carreras en el mejor tiempo posible, es esencial que el algoritmo de manejo autónomo sepa con precisión dónde se encuentra en el circuito y que elija los ángulos correctos para pasar adecuadamente por los espacios sin golpear un cono. Tradicionalmente, los especialistas en robótica usan sensores GPS para determinar la ubicación de un vehículo en un trayecto. El equipo ARG, para tener ventaja en la competencia, optó por tomar un enfoque más novedoso de la localización: LiDAR de alta resolución junto con mapeo 3D.
Los puntos OS1-16 se utilizan para localizar el vehículo dentro de un mapa HD 3D de la pista de carreras Zala Zone
A pesar de que es un método comprobado, los sistemas GPS dependen de mantener una conexión a la infraestructura satelital global, por lo cual tienen limitantes en cuanto a precisión, y sólo pueden localizar un vehículo en dos dimensiones.
Para lograr una precisión centimétrica con GPS, el método común es usar posicionamiento GPS de RTK o cinemática en tiempo real, el cual usa tanto la red satelital y una estación base de referencia en el suelo. Además se necesita una conexión constante a datos móviles para recibir información de corrección de posición; y el equipo que puede hacer esto a las altas velocidades de las carreras es extremadamente caro.
Utilizar LiDAR no sólo mejora la precisión de la localización del vehículo, sino también proporciona una solución robusta que no depende del ingreso de datos externos para dar información de posición. En condiciones reales, el GPS puede tener dificultades en ambientes con obstáculos grandes como rascacielos, a diferencia de LiDAR que se vuelve más robusto en ambientes abarrotados ya que hay más características únicas que puede usar el algoritmo para determinar la ubicación.
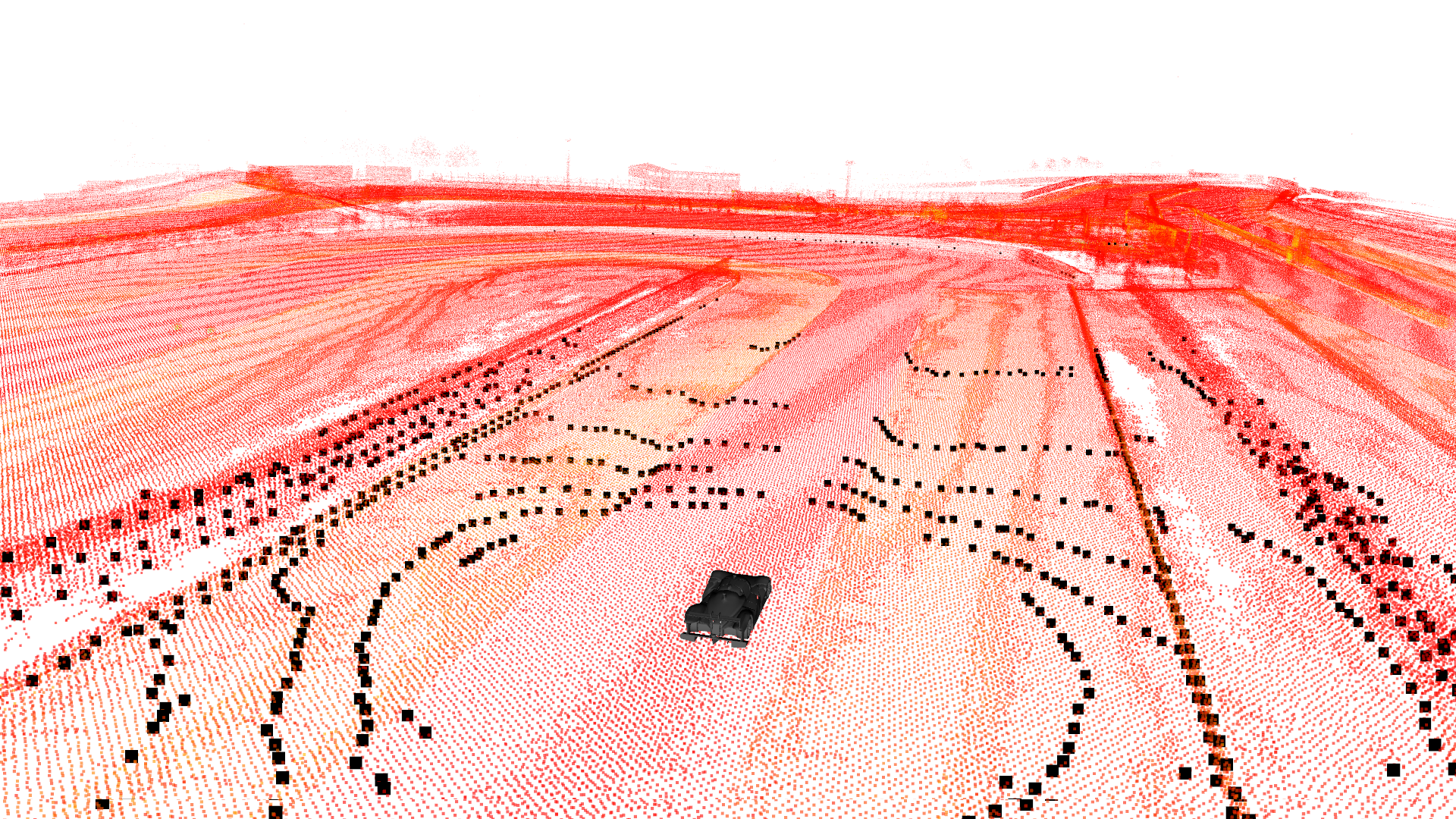
Lo que vio el sensor lidar al localizar el auto de carrera durante la carrera en Zala Zone
Para mejorar la robustez y precisión, y habilitar la localización 3D, el equipo de ARG tomó un enfoque innovador al usar LiDAR digital Ouster. Localizar por medio de un sensor LiDAR requiere dos pasos: primero, usar un sensor LiDAR para crear un mapa 3D del circuito previo a la carrera; y segundo, usar un sensor LiDAR durante la carrera para determinar la posición del vehículo dentro del mapa 3D.
Vista de pájaro del coche de carreras localizándose en la pista y siguiendo la ruta óptima de viaje durante la carrera en Francia
El equipo de ARG primero mapeó el circuito, usando un OS1-64 para crear un mapa 3D de alta definición. Al momento de las carreras, el equipo usó un OS1-16 para localizar el auto dentro de su mapa 3D de alta definición.
A continuación, les presentamos un par de videos del equipo, donde se detalla el proceso de localización:
Impulsando la industria
El LiDAR digital de alta resolución permite un mejor desempeño de localización autónoma. Al usar un enfoque con base en LiDAR junto con el OS1, el equipo de ARG mejoró la localización de su vehículo más allá de lo que es posible con GPS. Esta localización les ayudó a registrar la vuelta más rápida y obtener el primer lugar en la carrera en Croix en Trenois, y un segundo lugar en Zala Zone.
Traducido por Ingrid Inzunza.
Artículo original publicado por Blog Ouster. Para leer el artículo original ingresa aquí
*Este artículo es para fines informativos, no hay intenciones de infringir derechos de autor.